SHARP Dry Run
An Outdoor Robot Navigation Event
| Copyright: | Copyright 2007 Dean Hall. All rights reserved. |
|---|---|
| Author: | Dean Hall |
| Revision: | 06 FINAL |
Purpose
This document describes an invitation to and description of an exercise in robotics focusing on outdoor navigation. This page is in FINAL form. Any changes to this document will be listed in the following Changes section.
Changes
In reverse chronological order:
- 2008/04/05
- Changed event time to 3pm. Date and location are the same.
- 2008/02/23
- Added one more digit of precision to the Waypoint list in Degrees Decimal-Minutes format.
- 2008/02/02
- Changed the event date to Saturday April 12 to accomodate participant's schedules.
- Deprecated Course 3 due to standing water near Waypoint 4 days after the last rain. Try Course 4 instead.
- Updated the official KML file: Added Waypoint 5 and Course 4.
- Added photos of the courses as seen from their starting points.
- Added Waypoint list in Degree Decimal Minute format (limited precision).
- Site inspection: Bathrooms are clean and stocked with toilet paper.
- Host will not supply disposable drinking cups.
- 2007/12/07
- Document set to FINAL.
Invitation
This event is open to anyone who shows up, free of charge. As a semi-regular attendee of SHARP, I extend a specific invitation to fellow members. I will use the SHARP mailing list as the discussion forum for this event. Please notify Dean (or announce on the SHARP mailing list) if you are coming, so we can plan accordingly.
| Event: | SHARP Dry Run, Spring 2008 |
|---|---|
| Location: | Stein Family Park, 9601 Braes Bayou Drive, Houston, TX |
| Date: | Sat. April 12, 2008 (Google calendar) |
| Time: | 3pm. |
| Rainout Date: | TBA |
The Stein Family park pavillion is not reservable, so we should occupy it as early as possible on the event date. This park is a popular birthday party locale.
Weather forecasts will be observed and a rainout will be announced by 5 p.m. on April 11th on this page and on the SHARP maillist.
Organization
The location provides:
- Parking lot
- Bathroom facilities; clean and stocked with toilet paper
- One large shelter with 4 picnic tables and one electrical outlet (untested)
- Two small shelters with 1 picnic table each
- 2 grills (standing)
- Playground
- Trash bins
The host provides:
- One 25' extension cord
Participants may want to bring:
- Robot(s) and interested friends and family
- Tools or equipment necessary for changes and repairs
- Portable computer (with hood for visibility in daylight)
- Extension cord and power strip(s)
- Seat cushion for the picnic table
- Folding chair(s), parasol
- Refreshments (No booze, park rules)
- Your own waypoint marking devices (such as orange cones) that are specific to some detection system on your robot
- DC-to-AC automobile power converter (in case park's AC is not sufficient)
- Your own toilet paper just in case
I am looking for volunteers to lend (please let me know if you can):
- A large thermos for water.
- A rolling meter/yard marker (used for measuring and marking football fields)
- 50m/yard measuring tape
The Event
The SHARP Dry Run is an opportunity for robot builders to demonstrate the outdoor navigation capability of his or her autonomous robot. The Dry Run event is composed of two paved courses and one off-road course set in a small county park.
Course 1
The first course shall start at Waypoint 0, proceed 50 meters to Waypoint 1 and return directly to Waypoint 0. The straight-line path is completely paved, approximately 3 meters (9 feet) wide.
Course 2
The second course shall start at Waypoint 0, proceed 100 meters to Waypoint 2 and return to Waypoint 0. This path has a very slight bend. If you don't follow the bend, you will go off pavement. The pavement is approximately 3 meters (9 feet) wide.
Course 3
We recommend avoiding Course 3. Try Course 4 instead. We observed standing water near Waypoint 4 two days after the last rainfall.
The third course shall start at Waypoint 3, proceed approximately 86.2 meters to Waypoint 4 and then approximately 88.5 meters to Waypoint 0. This path is completely off-road. The straight line from Waypoint 3 to 4 is short grass with one tree in the way and a 5 foot downhill 80% of the way to Waypoint 4. The route from Waypoint 4 to 0 is extremely challenging; it has many obstructions: trees, playground curbs and equipment and changes in elevation.
Course 4
The fourth course shall start at Waypoint 3, proceed approximately 58 meters to Waypoint 5 and then approximately 103.2 meters to Waypoint 0. This path is completely off-road. The straight line from Waypoint 3 to 5 is short grass with one tree in the way. The route from Waypoint 5 to 0 is extremely challenging; it has many obstructions: trees, playground curbs and equipment.
Navigation Data
I recommend downloading Google Earth to view the official KML file that has all the waypoints, courses and features of the event site.
In Decimal Format (obtained from the <coordinates> element in KML file, NOT the <latitude> and <longitude> elements within the <LookAt> element):
| Waypoint | Latitude (N) | Longitude (W) |
|---|---|---|
| 0 | 29.67490961937683 | -95.51383212873118 |
| 1 | 29.67462512010224 | -95.51423385325262 |
| 2 | 29.67436488545652 | -95.51465910382082 |
| 3 | 29.67452171622683 | -95.51480457661714 |
| 4 | 29.67528400714399 | -95.51464039004375 |
| 5 | 29.67504150770883 | -95.51488938184723 |
A note about the long decimal numbers: These numbers come from Google Earth. I have no way to mark a waypoint as precisely as these long numbers describe. Please allow and expect leniency with the accuracy and precision of these numbers.
In Degrees Decimal-Minutes format (comparable to NMEA output):
| Waypoint | Latitude (N) | Longitude (W) |
|---|---|---|
| 0 | 29 40.4946 | 095 30.8299 |
| 1 | 29 40.4775 | 095 30.8540 |
| 2 | 29 40.4619 | 095 30.8795 |
| 3 | 29 40.4713 | 095 30.8883 |
| 4 | 29 40.5170 | 095 30.8784 |
| 5 | 29 40.5025 | 095 30.8934 |
Notice that there are no negative signs in front of the longitude values for this format, but be assured we are in the western hemisphere.
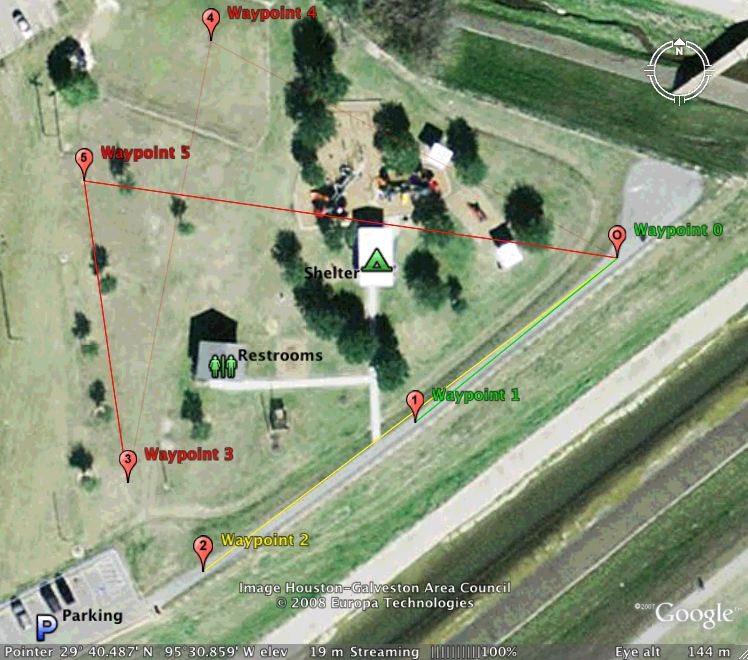
Imagery
The overhead map of the event site:
A photo taken on 2008/02/01 from near Waypoint 0 looking toward Waypoints 1 and 2. Notice the fence between the path and the bayou on the left and the ditch on the right.:

A photo taken 2008/02/01 from near Waypoint 3 looking toward Waypoint 4 which is out of view in the distance in-line with the center of the photo. Unmarked Waypoint 5 is behind the tree whose trunk intersects with the yellow support wire in the left 1/8th of the photo:
